 |
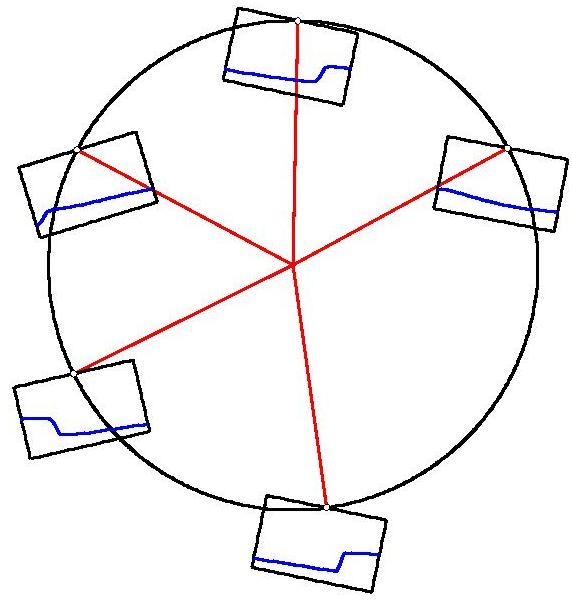
Shallow water sloshing in 3D rotating vessels
|
| |
|
| |
Details of the numerical algorithm used to solve the rotating shallow water equations (SWEs) are recorded in the report below, and the Matlab code is available for downloading.
The equations are derived in J. Fluid Mech. 667 474-519 (2011).
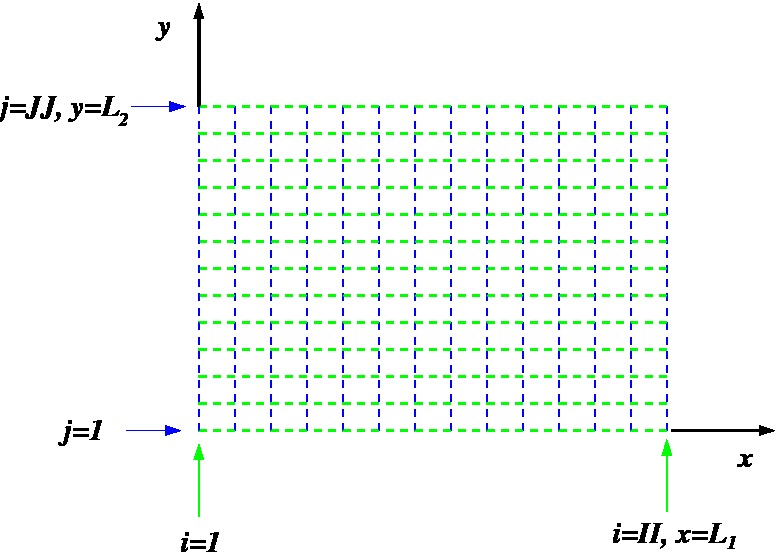
The numerical scheme is a fully-implicit split-step scheme with second
order accuracy in both space and time that has been widely used in hydraulics. The nonlinearity is treated in the Eulerian representation using iteration. The new features in the algorithm here are (a) the inclusion of full time-dependent rotation due to the
rigid body motion of the vessel, and (b) the use of exact boundary conditions in both steps of the split-step scheme. In Section 2 of the report the algorithm for the SWEs in one space dimension is outlined. This algorithm is a streamlined version of the algorithm
used in the 3D numerics. The simplification introduced here is that the nonlinear term is replaced by the linear term, using mass conservation, in the U-momentum equation.
|
| |
|
| |
 *
Matlab file for fully implicit ADI scheme *
Matlab file for fully implicit ADI scheme
|
| |
| |
- H. Alemi Ardakani & T.J. Bridges. Shallow water sloshing in rotating vessels: details of the numerical algorithm, Internal Report:
pdf file
|
|
 |
 SW sloshing homepage
Mathematics homepage
SW sloshing homepage
Mathematics homepage