
Mobile Hybrid Virtual Reality and Telepresence for Planning and Monitoring of Engineering Projects
A Retik^, N Clark, R Fryer, R Hardiman, D McGregor, G Mair, N Retik, K Revie
^Department of Civil Engineering, University of Strathclyde ,Glasgow G4 0NG
Tel: 0141-548 3420
Fax: 0141-552 0112
e-mail: a.retik@strath.ac.uk
Abstract The paper presents an EPSRC and industry funded research project which aims to integrate Virtual Reality (VR), Telepresence (TP), and mobile video telecommunications technologies. A mobile, real-time, 3D hybrid VR/TP system is being built at Strathclyde University, Glasgow. Once the system is completed, it will permit the user to integrate telepresence images with computer generated virtual environments superimposed over the remote real world view. This integrated system will incorporate emerging mobile telecommunications technologies to give rapid and easy access to the real and virtual construction sites from arbitrary locations. This system will also allow remote surveillance of a construction site, and integration of real world images of the site with virtual reality representations, derived from planning models, for progress monitoring.
First, the background of this research is described and the research objectives and methodology are presented. Then, the system components are briefly described with an emphasis being placed on the role of VR in the system. Finally, the research challenges in the development of the VR sub-system and its integration into the system are discussed and the applicational aspects are outlined.
Keywords: Augmented Reality, Hybrid Virtual Reality, Telepresence, Mobile Communications, Construction.
Telepresence Homepage: http://telepresence.dmem.strath.ac.uk
Video Compression Homepage:http://www.cs.strath.ac.uk/sct
VCSRG Homepage:http://www.strath.ac.uk/Departments/Civeng/conman/vcsrg.html
1. Background
Major construction operations take place on large sites. The complexity of the operations required to construct complex buildings and/or other civil engineering structures makes efficient monitoring and control a key management issue. In this task the gathering of site-specific information and its integration with current and planned activity is vital.
However, there are still many problems of efficient monitoring and control as a consequence of the scale of operations undertaken. Moreover, new procurement techniques (such as design-build) which have been introduced to speed up delivery of projects, demand closer interaction with sites by parties involved, such as designers, clients, etc. Efficient communication with the sites from remote locations is, therefore, a crucial issue for the project success.
Our project addresses as these problems by providing remote (fixed or mobile) access to a 3D visual presentation of the project status (presenting actual vs planned) and thus enabling a correct understanding of both current progress and work to be done. This will be achieved by integration of the developed techniques of a mobile sensor platform deployment in the unstructured environment of the construction site, the fusion of real world telepresence information with virtual reality simulations, and the incorporation of mobile telecommunications.
The analogous work on the elemental components of the project has been carried out at various sites world-wide. For example, two of the team members have already developed a telepresence system which has been widely reported (Mair et al, 1994, 1995a, 1995b, 1996) with a recent public demonstration carried out across a distance of 500 miles each way using an ISDN telephone link. Work has also been undertaken at a number of other establishments on telepresence and teleoperation (e.g. Weisbin & Lavery, 1994, Sheridan, 1993). The superposition of computer generated images upon their real world equivalents has been carried out (Oyama et al, 1993), and telepresence used in earth renovation by the Japanese Ministry of Construction has been reported (Michitaka & Hirose, 1995).
The application of Visualisation and VR techniques to civil engineering has been reported, (e.g. Hendrickson & Rehak, 1993, Bridgewater et al, 1994, Ribarsky et al, 1994, Powell, 1995, Stone and Connel, 1995). A major problem for construction applications (which is targeted by this research) is that existing software tools have principally been developed for designers to deal with product design and visualisation (e.g. 3D modelling of a building and 'walk through'), while construction planning tasks (e.g. scheduling, progress monitoring, etc.) are a process design. Although research work has been undertaken on the modelling and simulation of the construction process these address either optimisation of construction task sequencing or 3D animation of construction progress (Paulson, 1995). As described and demonstrated by Retik (Retik & Hay, 1994, Retik, 1995), visual interactive simulation of a construction process may assist a planner or user to a better perception of the task as well as help the integration of other parties involved in the planning process. This approach will be extended in the project to monitoring not only of the construction process itself, but also all auxiliary activities including on site plant and equipment.
In order for the TP capability to be fully realised it is necessary for stereoscopic images to be gathered from the remote site. A mobile system requires wireless communications, radio telephone would be most convenient. Work under way in the Department of Computer Science has the provision of such a facility as a short-term goal. For reasons of IPR protection, publicity for this work has been restrained but is now commencing (Lambert et al, 1996a, 1996b). This technology should enable multiple, low-cost, mobile telepresence systems to be constructed very easily. (It differentiates our approach to one presented by Thorpe et al (1995) and Doyle, 1995). This project is one of the early beneficiaries of this novel technology.
2 Research objectives and methodology
This project aims to integrate the Virtual Reality (VR), Telepresence (TP), and mobile video telecommunications technologies. In the project context, VR involves the impression of participating in a computer generated synthetic environment, TP the impression of being present at a remote construction site. VR and TP will be integrated into immersive and non-immersive modes. An immersive mode in principle allows the user to feel completely present in the virtual or remote location through the use of 3D displays etc. A non-immersive mode leaves the user aware of his or her immediate environment but able to observe the virtual or remote site through some such device as a computer monitor or video display.
A mobile, real-time, 3D hybrid VR/TP system is currently being built at the University of Strathclyde, Glasgow. Once completed, it will permit the user to integrate telepresence images with computer generated virtual environments superimposed over the remote real world view. This integrated system will incorporate emerging mobile telecommunications technologies to give rapid and easy access to the real and virtual construction sites from arbitrary locations.
The project will therefore research, develop, build, test and critically analyse the performance of a prototype mobile hybrid VR/TP system for use on construction sites. This system will allow remote surveillance of the construction site, and integration of real world images of the site with virtual reality representations, derived from planning models, for progress monitoring.
To achieve these objectives a system prototype will be designed, constructed and implemented in the area of highway engineering (in co-operation with an industrial partner - Babtie Engineering).
The key elements of the approach are:
a) Integration of real and synthetic images (also called augmented reality): Existing technology should allow real images to be integrated into the 3D world. Such an ability will be crucial for design and planning of construction projects which always are an integral part of a project environment.
b) Access to remote sites: The real progress of the project as well the site control can be assessed remotely and examined interactively providing more efficient use of the manager's time. Moreover, means of intelligent superimposition and comparison of actual vs planned situations will create possibilities which are not available today, e.g. presentation of selected trades, separate presentation of critical activities, remote site inspection and progress verification by the client etc.
3. System description and current status
The system consists of three main parts:
� a virtual reality module for planning and scheduling of construction projects as well as a mobile platform deployment.
� both static and mobile telepresence platforms for acquiring real time, real world data on the remote construction site.
� communications module to link a construction site with remote users.
Once fully integrated, an additional hybrid virtual reality and telepresence module for viewing and monitoring the planned progress of the site work with respect to real progress will be created. The view will be from either a fixed or mobile position.
3.1 VR Module
This module allows creation of a 'virtual construction project' from a schedule and subsequent visual monitoring of, and interaction with, the progress of the simulated project. (see Fig.1). It is based on the prototype developed at Strathclyde's Virtual Construction Simulation Research Group (VCSRG) and described in detail in (Retik, 1995).
The module consists of (a) a generic library of the 3D images of the project's building structures and site, environment and activities and (b) the means of subsequent visual simulation of the construction process. Operations of the module include: plan formulation (generation of construction and site-related activities and their sequence, schedule generation and resource allocation etc.), automated (intelligent) and manual (non-intelligent) mapping of activities and facilities to their appropriate graphical representations and the projection and simulation of the progress of work in a virtual environment on-screen based on the project schedules.
3.2 Camera Platforms
In this project the intention is to construct two camera platforms.
The first will be operated from a fixed position and have a simple pan and tilt monocular camera system with zoom capability. The compact camera, drive, and control system may be powered either from a mains or battery supply.
The second platform will be mounted on a remotely controlled tracked vehicle, which is provided by the vehicle manufacturer (Alvis Logistics Ltd.). This platform will have a stereo camera pair capable of pan, tilt, and roll movements and it will be powered from the vehicle batteries. The vehicle and platforms at the remote site will be controlled from a home site which could be any distance away. In fact the project aims to make the distance between the home and remote site completely irrelevant. This home site will have both non-immersive and immersive display and control equipment. For example the platforms will be controllable both from conventional computer peripherals or from a head tracker attached to a head mounted display. Communication between the home and remote site will be via the mobile-phone GSM system. This will incorporate image compression software developed within the University.
The camera platforms and the associated control system are being developed from the "Mark I" Strathclyde Telepresence System developed by the University's Transparent Telepresence Research Group (Mair et al, 1995b). An illustration of the original system is shown below (see Fig.2). This system has already been operated over long range using ISDN2 (128 kb/s) on a number of occasions, e.g at the IEE 1996 Scottish Christmas Lectures the system was demonstrated operating between Aberdeen University and the BT Laboratories at Ipswich a distance of approximately 500 miles. However our new system will have unlimited range and be able to operate from battery power thus making it truly mobile (see a virtual prototype operating on a virtual site in Fig.3).
3.3 Communications Module
The user of the system must be linked to the remote site via a communications channel. This has two purposes.
1) From user to remote site - To send user commands to the remote site to move the camera platform and the mobile vehicle.
2) From remote site to user - To send video pictures from the cameras back to the user and to send actual positional information to allow the VR system to render the appropriate image. Also, depth information derived from the stereoscopic cameras can be sent allowing correct overlay of Virtual and Actual objects.
A wireless system has been selected using domestic mobile telephones. These are both cost effective and readily available. It allows both the static and mobile systems to be used in remote sites, where there is no access to ordinary telephone lines and the mobile system to move untethered.
In order to send video over the mobile telephones, video compression technology is required. This is based on software developed in the Computer Science Department, University of Strathclyde, optimised for the low bandwidths of mobile telephones (Lambert et al, 1996a, 1996b). Both monoscopic and stereoscopic pictures will be transmitted for display on a VR Headset or user's screen.
The communications module has been developed in a generic fashion and has been demonstrated over mobile telephones, modems, ISDN and Internet connections.
4. Discussion
The research challenges involve the design of telepresence equipment suitable for deployment within unstructured environments such as the construction site, development and assessment of appropriate VR software, integration of this VR with the real world information, and the use of mobile telecommunication technology. Remote fixed or mobile access to a 3D visual presentation of the project status (presenting actual vs planned) will enable correct understanding of both current progress and work to be done, so providing an effective tool for a project manager.
Various problems specific to the construction industry have been identified which should be greatly ameliorated by using the output of this project. Visualisation of progress of construction requires representation of changes in the geometry of a building or structure. Such changes prevent efficient use of existing 3D architectural and structural models for planning purposes. Moreover, geometrical representation of construction activities is not always 'compatible with' or even presented by design models. Therefore, integration of real images of a site with simulation of a site and interaction with the construction process will require the ability to model dynamic changes to the site geometry.
There are several ways of augmenting and superimposing real and synthetic images. These are currently being addressed during the research. One of the possible ways of superimposing actual (real images) versus planned (virtual images) construction work progress is demonstrated in Fig.4. At this stage these images are superimposed manually.
5. Conclusions
The construction industry will be directly benefited by an enhanced capability for the cost-effective satisfaction of the client's specification within acceptable safety limits. Specific beneficiaries within the industry include planning authorities and architects who, at the inception and early design stages, will be able to view designs in relation to the real world as well as to judge environmental impact and project implications for surrounding facilities and services. Project managers and contractors, being able to simulate a scheduled plan, will be more effective in preventing clashes, optimising task durations, and managing site space and transportation. Moreover, communication of schedule information and coordination of involved parties will be eased during both the planning and monitoring phases. In terms of safety arrangements, simulation and visualisation of work done/to be done will not only allow better planning and monitoring at all project phases (as required by the new safety (CDM) regulations) but also allow their more effective communication to those involved in the construction process.
Acknowledgement
This work is supported by the EPSRC MNA programme (Grant GR/L 06164) in collaboration with ALVIS Logistics, Orange & Babtie Engineering.
Figure 1. A VR interface for project planning
Figure 2. "Mark I" telepresence system
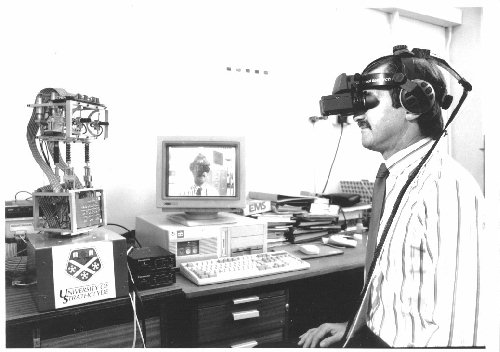
Figure 3 A virtual prototype operates on a virtual site.

Figure 4. 'Actual vs planned' project monitoring.

References
C. Bridgewater, M. Griffin & A. Retik, "Use of Virtual Reality in Design and Planning of Construction Projects", Proc. 11 ISARC Conference, Brighton, 1994
N. Doyle, "Seeing is Believing", New Civil Engineer, Oct. 1995, pp28-30.
C. Hendrickson, D. Rehak, "Potential of A 'Virtual' Construction Site for Automation Planning and Analysis", Proc. of the 10th ISARC Conference, Houston, May, 1993, pp. 511-518.
R. B. Lambert, R.J.Fryer, W.P.Cockshott and D.R.McGregor, "A Comparison of Variable Dimension Vector Quantisation Techniques for Image Compression",
Proc. ECMAST'96, Louvain-la-Neuve, Belgium, May 1996a.
R.B. Lambert, R.J. Fryer, W.P. Cockshott and D.R. McGregor, "Low Bandwidth Video Compression with Variable Dimension Vector Quantisation", Proc. ADViCE'96, Cambridge, UK, July, 1996b.
G.M. Mair, G.Heng, R.J. Fryer; "The Design of Mechatronic Anthropometric Sensor Platforms"; Published in "Mechatronics" - The Proceedings of the Joint Hungarian - British International Mechatronics Conference, Sept. 21-23, Budapest, 1994.
G.M.Mair, R.J.Fryer, J.G.Heng, G.Chamberlin, "An Experiment In Three Dimensional Telepresence, IEE Colloquium, London, 1995a.
G.M.Mair, R.J.Fryer, J.G.Heng, N.Clark. "Anthropomorphic Telepresence Systems -Design Issues", Proceedings of the 4th International Conference Interface To Real & Virtual Worlds; Montpellier, France, 1995b pp 125-135.
G.M. Mair, R. Fryer, J. Heng, N. Clark, D. Sheat, "Long Range Telepresence Using ISDN",; Mechatronics'96 Conference, Portugal, Sept 1996.
Michitaka Hirose; Recent Trends in Virtual reality Technology, Proceedings of MPEG-4 and Virtual Reality Object Coding Symposium, July 1995.
Oyama, Tsunemoto, Tachi, Inoue. Experimental Study on Remote Manipulation Using Virtual Reality; Presence Vol. 2, No 2 1993.
B. Paulson, Computer Applications in Construction, MGraw Hill, 1995.
J. Powell, (Ed) Proceedings of EPSRC Conference on VR and Rapid Prototyping, Salford, 1995.
A. Retik, R. Hay "Visual Simulation using VR", 10th ARCOM Conference, 1994, pp. 537-546.
A. Retik, "VR System Prototype for Visual Simulation of the Construction Process, EPSRC Conference, Salford, 1995, pp. 90-93.
W Ribarsky et al, "Visualisation and Analysis using VR", IEEE Computer Graphics & Appl., Jan. 1994, pp. 10-12.
T.B. Sheridan; Teleoperation, Telerobotics, and Telepresence: A Progress Report; Control Eng. Practice Vol. 3 No. 2 1993
R J. Stone, A Connel, "Real Application .. Virtual Solution", in EPSRC Conference on VR and Rapid Prototyping, 1995, pp.1-16.
A. Thorpe, A. Baldwin, C. Carter, D.Leevers and D. Madigan, "Multimedia Communications in Construction", Proc. Instn. Civ. Engrs, Civ. Engng, 108, 1995, pp12-16.
C.R. Weisbin, D. Lavery; NASA Rover and Telerobotics Technology Program, IEEE Robotics and Automation Magazine, December 1994.
Telepresence Homepage: http://telepresence.dmem.strath.ac.uk
Video Compression Homepage:http://www.cs.strath.ac.uk/sct
VCSRG Homepage:http://www.strath.ac.uk/Departments/Civeng/conman/vcsrg.html